|
        
Elekronik-Einschub für das Gato
Nach Fertigstellung des Druckrohres, wird der Einschub-Rahmen gefertigt. Ich habe mich entschlossen, Flachband-Aluminium (15 x 2 mm) zu verwenden. Dieses ist im Baumarkt erhältlich.
Die drei Flachbandleisten werden von insgesamt drei Rundspanten aus Acrylglas getragen.
Die Acrylglasspanten werden außen mit Vertiefungen für die Aufnahme der Flachbandträger ausgestattet und erhalten M3-Gewindebohrungen zur Befestigung. Innen wird jeder Spant individuell nach den Erfordernissen angepasst.
Zur besseren Ansicht bitte die Bilder anklicken
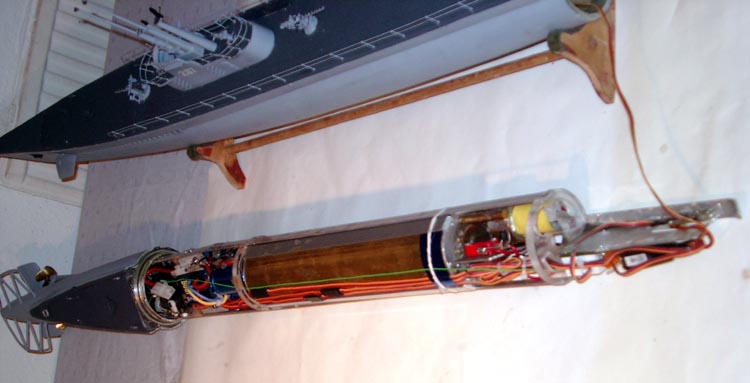
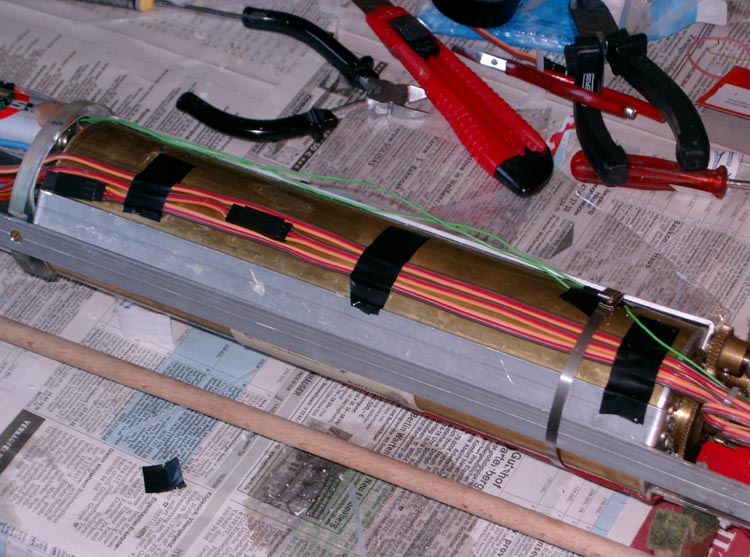
Gesamtansicht des Einschubgerüstes.
Empfänger, Tauchzellensteuerung und Lageregler liegen im Bug.
Motoren, Heckservos, Antriebsakkus und Fahrregler liegen im Heckbereich.
|
|
Ansicht des Druckrohrs vom Heckbereich.
Hier muss der Einschub komplett durchpassen und auch noch beweglich sein, um den Verschluss zu realisieren.
Der Einschub wird um ca. 18 Grad verdreht angesetzt und danach mit dem Mittelrumpf passend verschlossen.
|
|
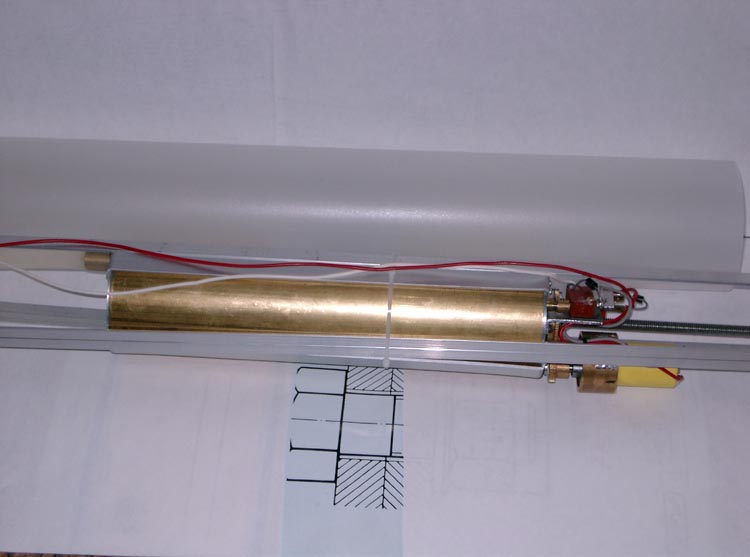
Die Tauchzelle ist eine Spezialanfertigung von Ralf Greiwing. Er fertigte mir die Zelle nach meinen Vorgaben. Der Zylinder hat ein Außenmaß von 70 mm, das Getriebe steht auf ein Durchmessermaß von 82 mm. Dieses Maß ist durch den Bajonettring vorgegeben.
|
|
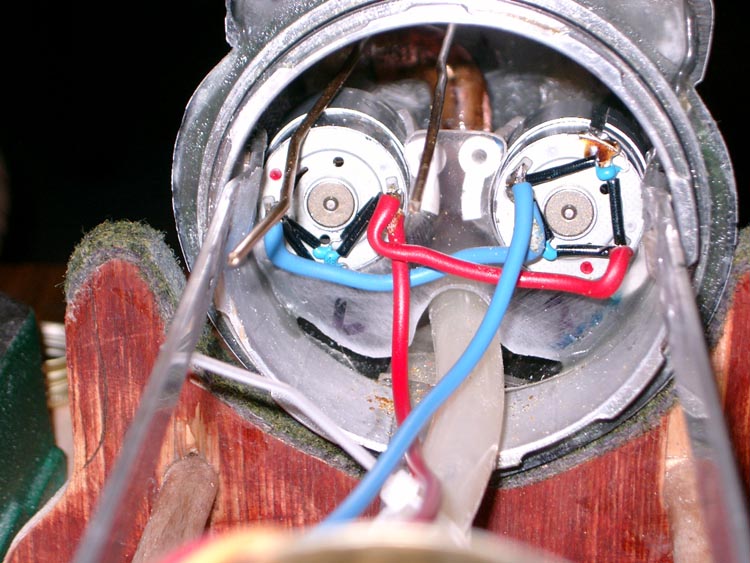
Die beiden Getriebe-Motoren von "aeronaut"; die Motoren besitzen ein Getriebe von 3:1 und haben eine Betriebsspannung von 7,2 V. Bei 6 V Betriebsspannung erreichen die Propeller eine Umdrehung von 5000 U/min.
Deutlich zu sehen, die Verschlüsse der Stevenrohre, ausgestattet mit Simmerringen und Kugellager der Firma "Harhaus".
|
|
Das Gerüst wird dem Heckteil angepasst und mit Epoxydharz im Heckbereich eingeklebt.
Anschließend wird der Druckschlauch für die Tauchzelle im Heck angeschlossen und der Trägerspant für die Motoren gefertigt. Die Motoren liegen frei auf diesem Spant und werden an den oberen Flanschen verschraubt.
Da ich nur einen Fahrregler verwende, werden die Motoren über Kreuz verdrahtet (gegenläufige Drehrichtung), nach dem sie vorher ihre Entstörsätze erhalten haben.
|
|
Da es im Boot auf jeden Millimeter ankommt, wird die Grundplatte für die Heck-Servos (Seiten- und Tiefenruder) direkt an die Motoren angesetzt. Die Grundplatte wurde aus 8 mm Acrylglas gefertigt. Sie ist mit 4 Schrauben M3 im Gerüst befestigt. Die Trägerplatte wird von einem 2/3 Spant zu den Akkus getrennt.
|
|
Nach der Erprobung in "Heimischen Gewässern", stellten sich Stabilisierungs-Probleme ein.
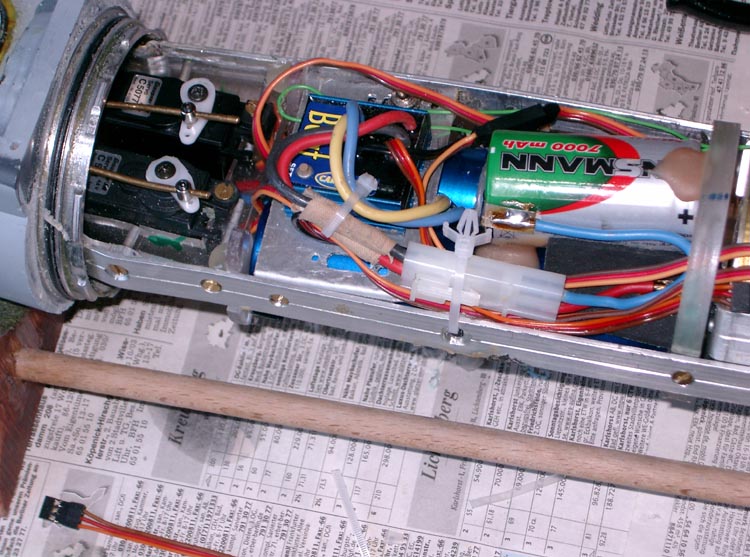
Danach habe ich versucht, alle Bauteile noch einmal tiefer zu setzen. Immerhin konnten die Akku-Zellen um 9 mm tiefer gelegt werden.
Im unteren Teil liegen jeweils zweimal zwei Zellen in Reihe geschaltet, die fünfte Zelle liegt im Dreieck über den beiden vorderen Zellen, über den beiden hinteren Zellen ist ein Trägerwinkel für den Fahrregler montiert.
Das Boot kommt mit einer Betriebsspannung von 6 V aus, die Zellen haben eine Kapazität von 7 Ah. Der Batterieraum wird mit einem 8 mm Spant abgeschlossen.
|
|
Zwischen Batterie- und Bugspant wird die Tauchzelle eingebaut. Das Getriebe der Tauchzelle liegt zum Bugspant.
An den Bugspant wird eine Acrylglasplatte montiert, welche als Träger für die Bugelektronik dient. Sie wird gleichzeitig auf dem verlängerten unteren Flachband befestigt. Der Träger sitzt asymmetrisch von der Mitte, damit das Gestänge der Tauchzelle problemlos vorbei laufen kann.
|
|
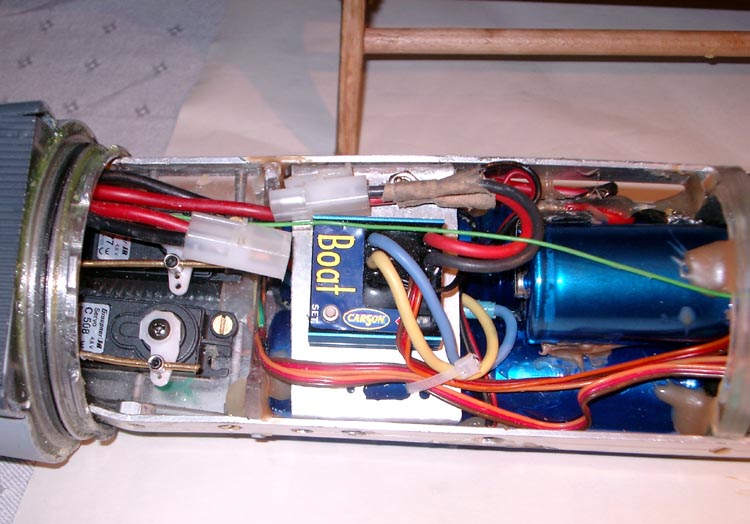
Im Bugbereich ist der Empfänger (benötigt werden 5 Kanäle), die Tauchzellensteuerung (hier von Norbert Brüggen) und der Lageregler untergebracht.
Die Tauchzellensteuerung übernimmt das Lenzen und Fluten der Tauchzelle, überwacht die Bordspannung und den Senderausfall, sowie einen Wassereinbruch. Alle drei Störungen führen automatisch zum Auftauchen.
|
|
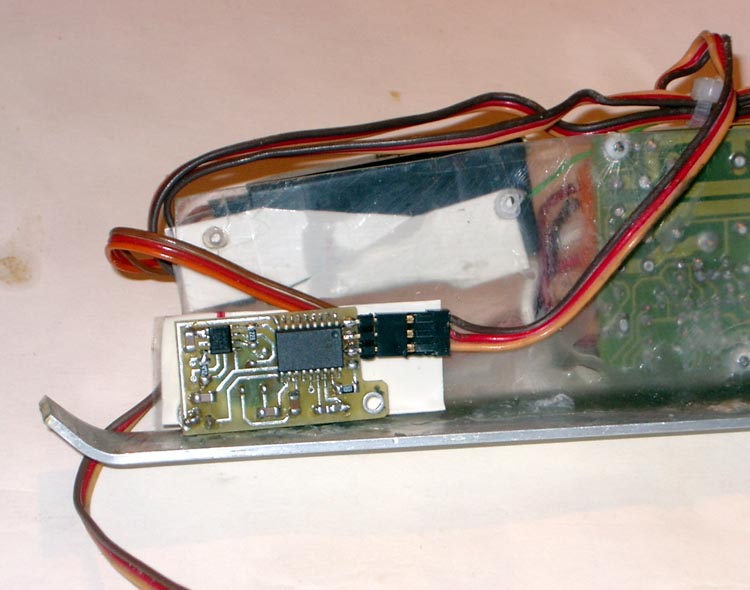
Der Lageregler:
Er steuert die horizontale Lage bei Fahrten unter Wasser und wirkt auf das Heck-Tiefenruder. Ohne einen Lageregler ist eine saubere Fahrt unter Wasser nicht möglich.
Informationen zum Lageregler und zur Tauchzellensteuerung finden Sie bei Norbert Brüggen.
|
|
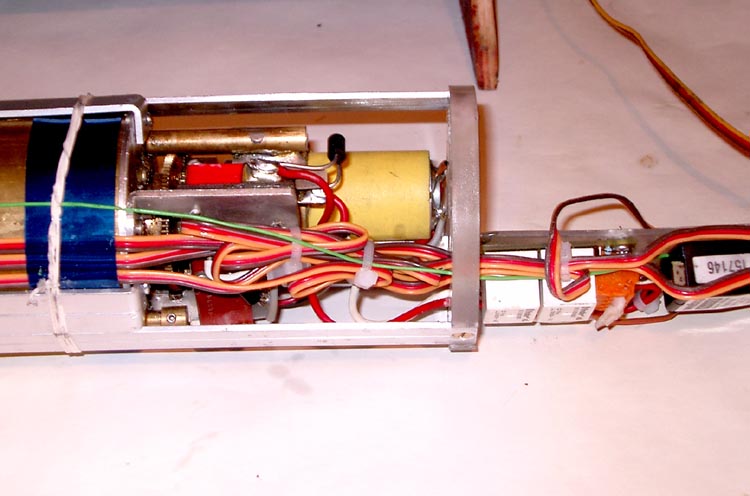
Verlegung der Servo-Kabel zur Ansteuerung der Heckfunktionen.
Heckservos und Fahrregler sind über Servoverlängerungen der Firma Graupner mit dem Empfänger im Bugbereich verbunden.
Auf einen magnetischen Betriebsschalter habe ich verzichtet. Der Fahrregler ist mit einem BEC-System ausgerüstet und der Einschalter liegt direkt auf Höhe des Bajonettringes. Ein Öffnen des Einschubs von nur 4 cm reicht, um die Versorgungsspannung einzuschalten.
|
|
|
Der beschriebene Aufbau des Einschubes klingt zwar einfach und logisch, ich kann aber den interessierten Leser nur sagen: "Manchmal habe ich das ganze Projekt verwünscht!"
Der Einschub wurde mindestens fünf mal wieder zerlegt und umgebaut.
zum Seitenanfang
|